|
| | Dijkstra_Min_Paths (Plus &&__plus=Plus(), Distance &&dist=Distance(), SA &&__sa=SA()) |
| |
| | Dijkstra_Min_Paths (Plus &__plus, Distance &dist, SA &__sa) |
| |
| void | compute_min_paths_tree (GT &g, typename GT::Node *start, GT &tree) |
| |
| void | compute_partial_min_paths_tree (GT &g, typename GT::Node *start, typename GT::Node *end, GT &tree) |
| |
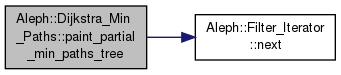
| void | paint_partial_min_paths_tree (GT &g, typename GT::Node *start, typename GT::Node *end) |
| |
| void | paint_min_paths_tree (GT &g, typename GT::Node *start) |
| |
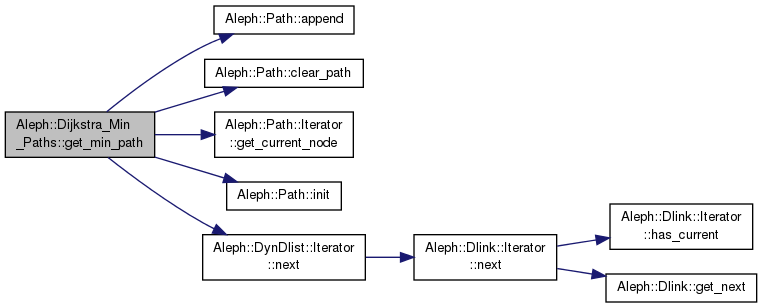
| Distance::Distance_Type | get_min_path (typename GT::Node *end, Path< GT > &path) |
| |
| Distance::Distance_Type | find_min_path (GT &g, typename GT::Node *start, typename GT::Node *end, Path< GT > &min_path) |
| |
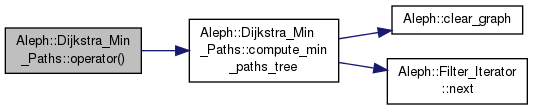
| void | operator() (GT &g, typename GT::Node *s, GT &tree) |
| |
| Distance::Distance_Type | copy_painted_min_paths_tree (GT &g, GT &tree) |
| |
|
Distance::Distance_Type | operator() (GT &g, typename GT::Node *s, typename GT::Node *e, Path< GT > &path) |
| | find_min_path()
|
| |
| Distance::Distance_Type | get_min_path (GT &tree, typename GT::Node *end, Path< GT > &path) |
| |
template<class GT, class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
class Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >
Calculo de árbol abarcador de todos los caminos mínimos desde un nodo dado según el algoritmo de Dijkstra.
Esta clase maneja el algoritmo de Dijkstra para calcular un árbol abarcador de todos los caminos mínimos desde un nodo s de un grafo g.
El algoritmo utiliza una cola interna cuya longitud máxima es proporcional número de nodos del grafo.
El algoritmo de Dijkstra es el que exhibe mejor desempeño y es por tanto el recomendado para la mayoría de aplicaciones de caminos mínimos.
El algoritmo de Dijkstra no opera para grafos con pesos negativos.
La clase recibe los siguientes parámetros tipo:
- GT: el tipo de grafo basado en List_Graph
- Distance<GT>: La clase de lectura del peso del arco que debe exportar los siguientes atributos:
- typedef Distance<GT>::Distance_Type: el tipo de dato que representa un peso en un arco
- Distance<GT>::Distance_Type operator()(typename GT::Arc *a): que retorna el valor del peso en el arco a
- Distance<GT>::Max_Distance: constante estática correspondiente al valor de distancia máximo que un algoritmo consideraría como valor infinito
- typename Distance<GT>::Zero_Distance: constante estática correspondiente al elemento neutro de la suma. Tradicionalmente, en la inmensa mayoría de casos, este será el cero
- Compare<GT>: clase que realiza la comparación entre dos pesos y cuyo prototipo es:
bool operator()(
const typename Distance<GT>::Distance_Type & op1,
const typename Distance<GT>::Distance_Type & op2)
Plus<GT>: clase que realiza la suma de distancias con el siguiente prototipo:
typename Distance<GT>::Distance_Type
operator()(
const typename Distance<GT>::Distance_Type & op1,
const typename Distance<GT>::Distance_Type & op2)
- SA: filtro de arcos para el iterador interno
- Ver también
- Find_Path_Depth_First Floyd_All_Shortest_Paths Bellman_Ford_Min_Spanning_Tree
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
| void Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::compute_min_paths_tree |
( |
GT & |
g, |
|
|
typename GT::Node * |
start, |
|
|
GT & |
tree |
|
) |
| |
|
inline |
Calcula el árbol abarcador de todos los caminos mínimos que parten desde el nodo start.
- Parámetros
-
| [in] | g | el grafo. |
| [in] | start | el nodo inicio de todos los caminos mínimos |
| [out] | tree | el árbol abarcador de todos los caminos mínimos que comienzan por start mapeado mediante los cookies al grafo g. |
- Excepciones
-
| bad_alloc | si no hay suficiente memoria |
Hace referencia a ARC_BITS, Aleph::clear_graph(), IS_ARC_VISITED, IS_NODE_VISITED, Aleph::Filter_Iterator< Container, It, Show_Item >::next(), NODE_BITS y NODE_COOKIE.
Referenciado por Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::operator()().
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
| void Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::compute_partial_min_paths_tree |
( |
GT & |
g, |
|
|
typename GT::Node * |
start, |
|
|
typename GT::Node * |
end, |
|
|
GT & |
tree |
|
) |
| |
|
inline |
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
| Distance::Distance_Type Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::copy_painted_min_paths_tree |
( |
GT & |
g, |
|
|
GT & |
tree |
|
) |
| |
|
inline |
Extrae el árbol de caminos mínimos (parcial o total) y lo pone en tree.
copy_painted_min_paths_tree() toma un grafo g sobre el cual están pintados los caminos mínimos (total o parcial) mediante llamadas previas a paint_min_paths_tree() o paint_partial_min_paths_tree() y extrae una copia hacia el parámetro tree.
- Parámetros
-
| [in] | g | el grafo previamente pintado donde están los caminos mínimos. |
| [out] | tree | el grafo donde se desea copiar el árbol abarcador |
- Excepciones
-
| bad_alloc | si no hay suficiente memoria. |
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
| Distance::Distance_Type Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::find_min_path |
( |
GT & |
g, |
|
|
typename GT::Node * |
start, |
|
|
typename GT::Node * |
end, |
|
|
Path< GT > & |
min_path |
|
) |
| |
|
inline |
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
| Distance::Distance_Type Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::get_min_path |
( |
GT & |
tree, |
|
|
typename GT::Node * |
end, |
|
|
Path< GT > & |
path |
|
) |
| |
|
inline |
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
Calcula el árbol abarcador de todos los caminos mínimos desde un nodo dado según el algoritmo de Dijkstra.
El árbol abarcador tree de todos los caminos mínimos resultante start_node está completamente mapeado con g. Por tanto, una búsqueda de camino en profundidad, mediante Find_Path_Depth_First, sobre tree encontrará y construirá cualquier camino mínimo desde start_node hasta un nodo cualquiera.
- Parámetros
-
| [in] | g | el grafo al cual se desea calcular el árbol abarcador mínimo. |
| [in] | s | nodo inicio de los caminos mínimos. |
| [out] | tree | el grafo donde se desea guardar el árbol abarcador resultado de todos los caminos mínimos que parten desde el nodo start_node. Este grafo es limpiado antes del comienzo del algoritmo. |
- Excepciones
-
| bad_alloc | si no hay suficiente memoria para construir tree; bien sea porque falla tree o por la cola interna. En este caso el valor de tree es indeterminado y no está limpio. |
Hace referencia a Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::compute_min_paths_tree().
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
template<class GT , class Distance = Dft_Dist<GT>, class Plus = Dft_Plus<GT, Distance>, class SA = Dft_Show_Arc<GT>>
| void Aleph::Dijkstra_Min_Paths< GT, Distance, Plus, SA >::paint_partial_min_paths_tree |
( |
GT & |
g, |
|
|
typename GT::Node * |
start, |
|
|
typename GT::Node * |
end |
|
) |
| |
|
inline |


 Gráfico de llamadas para esta función:
Gráfico de llamadas para esta función: