Prof. Ph.D. Anna Patete

Ordinary
Professor
Department of System Control,
System Engineering School (EISULA)
Universidad de Los Andes (ULA)
Mérida, Venezuela
Web:
http://webdelprofesor.ula.ve/ingenieria/apatete
| Prof. Ph.D. Anna Patete |
|
|
Web:
http://webdelprofesor.ula.ve/ingenieria/apatete
|
|
||||||
|
||||||
Quadrotor (Drone). Universidad de Los Andes.
Springo Inchworm Robot:
 Spring Inchworm Robot o SIR. Universidad de Los Andes.
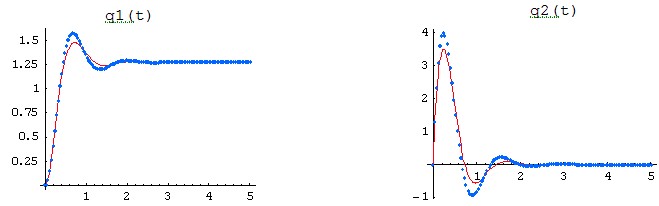
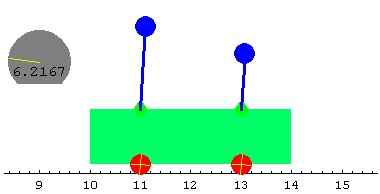
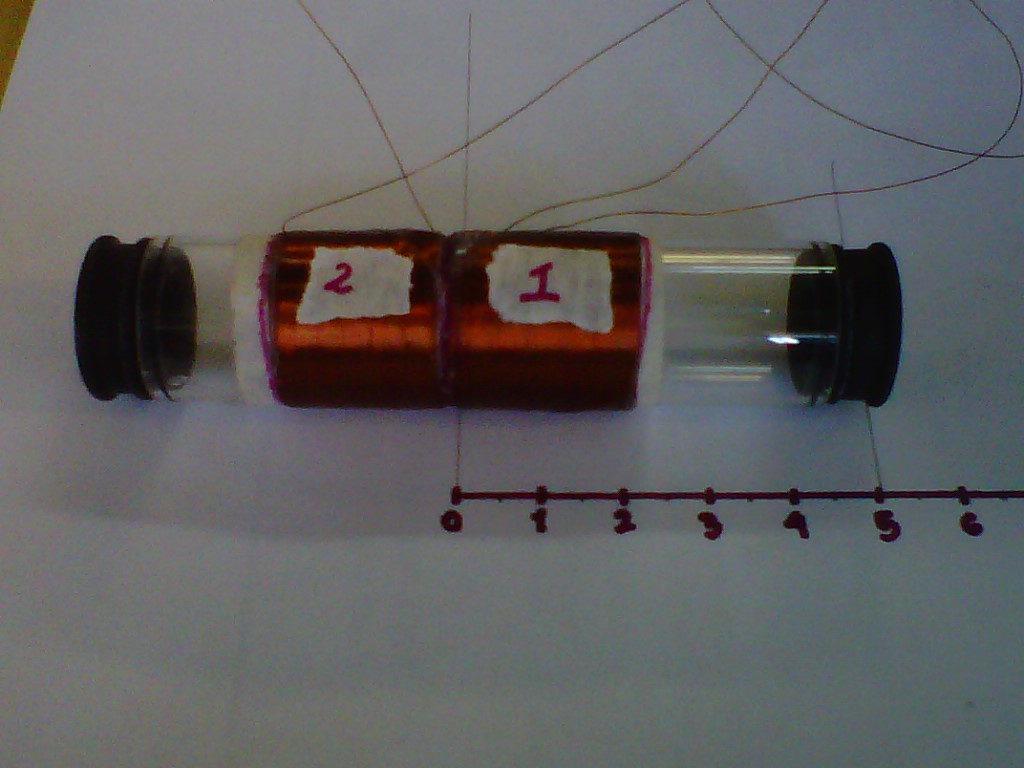 Capsubot. Universidad de Los Andes. |
||||||
|
||||||
|
Nonlinear
Dynamics Discretization:
Controlled simple
pendulum, position and velocity.
|
||||||
|


Inverted Pendulum.
Universidad de Los Andes.
Simple Pendulun. Universidad de Los
Andes.
|
||||||
Computational
Mimics:
Mimic of simple
pendulum.
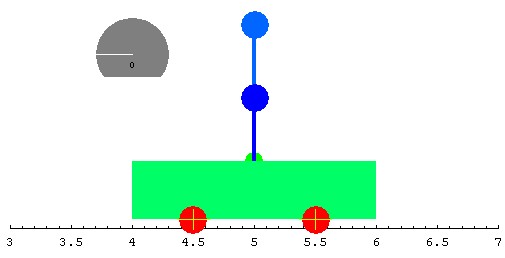
Mimic of inverted pendulum on a
car.
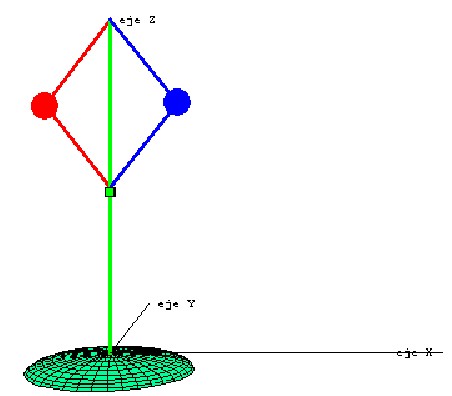
Mimic of
Watt regulator (3D).
|
||||||
Virtual
Simulator:
|
| Publications | Received
Education |
Awars and Honors |