Prof. Ph.D. Anna Patete

Profesor
Agregado
Departamento de Sistemas de Control
Escuela de Ing. de Sistemas (EISULA)
Universidad de Los Andes (ULA)
Web:
http://webdelprofesor.ula.ve/ingenieria/apatete
| Prof. Ph.D. Anna Patete |
|
|
Web:
http://webdelprofesor.ula.ve/ingenieria/apatete
|
|
||||||
|
||||||
Quadrotor (Drone). Universidad de Los Andes.
Robot Tipo Gusano:
 Spring Inchworm Robot o SIR. Universidad de Los Andes.
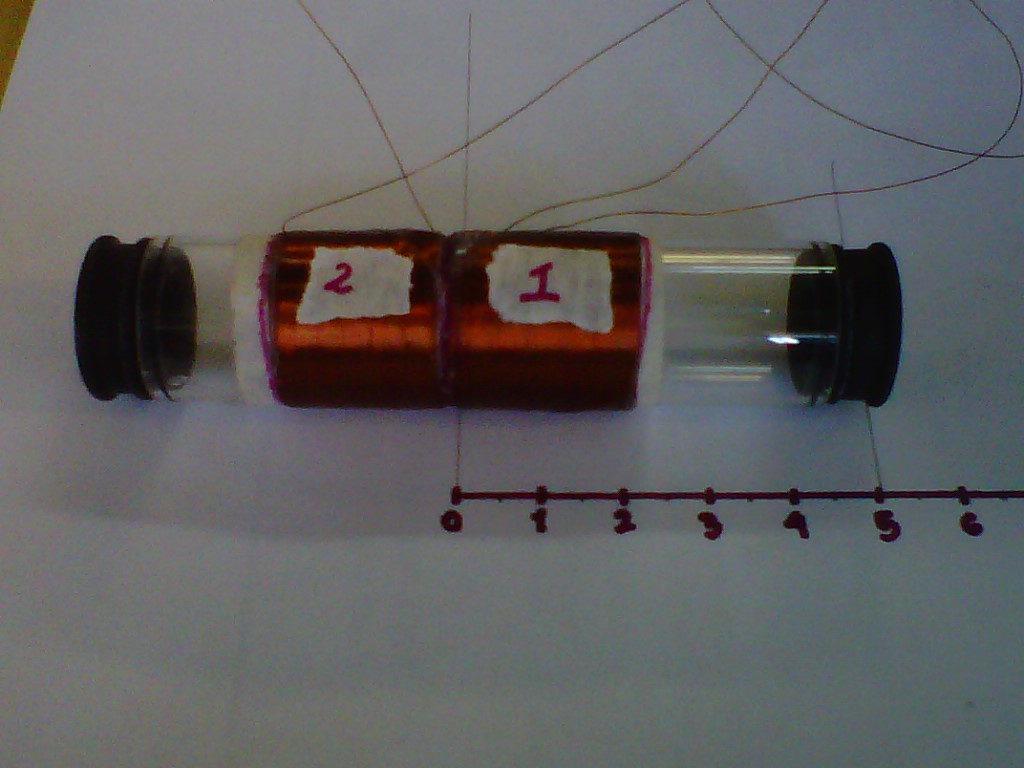 Capsubot a bajo costo. Universidad de Los Andes. |
||||||
|
||||||
|
Discretización
de Dinámicas no Lineales:
Dinámicas de posición y velocidad del péndulo
simple
controlado.
|
||||||
|


Péndulo
invertido. Universidad de Los Andes.
Péndulo simple. Universidad de Los
Andes.
|
||||||
Mímicos
Computacionales:
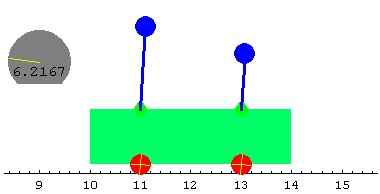
Mímico del doble péndulo
simple.
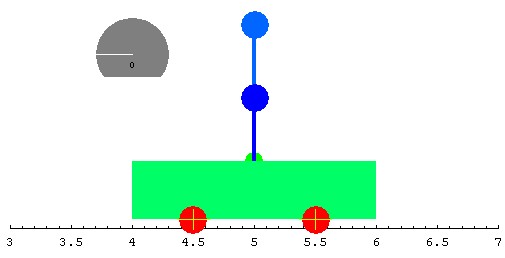
Mímico del péndulo doble invertido sobre un
carro.
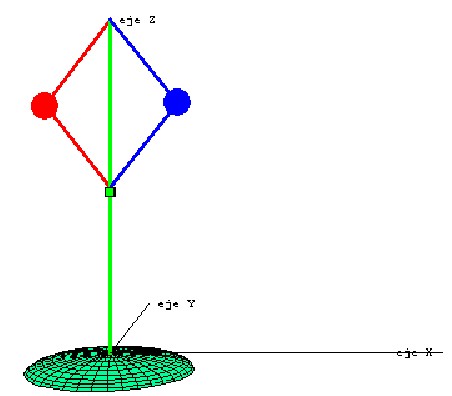
Mímico del Regulador de
Watt (3D).
|
||||||
Simulador
Virtual:
|
| Publicaciones | Docencia | Reconocimientos |