| Tutorados |
|
 Autor: Maria
Isabel Velasco Colmenares. Autor: Maria
Isabel Velasco Colmenares.
Titulo: Algoritmo de control
auto-ajustable para una clase de sistemas no lineales seg�un el
criterio de varianza m�nima generalizada.
Universidad de Los Andes,
Noviembre
2009.
Calificación: Aprobado.
Observaciones:
Proyecto de Grado de
Maestr�a
Publicaciones del proyecto:
- En
congreso: Patete
Anna, Maria Velasco, Katsuhisa Furuta, "Implicit Self-Tuning Control
for a Class of Nonlinear Systems". VI CIBELEC-2015,
2015.
M�érida, Venezuela.
- En
revista indexada: Patete
Anna, Maria Velasco, Katsuhisa Furuta, "Implicit Self-Tuning Control
for a Class of Nonlinear Systems". Revista Ciencia e Ingeniería.
M�érida, Venezuela. Vol. Edici�on Especial VI CIBELEC-2015,
2015. ISSN 1316-7081. ISSN Elect. 2244-8780.
|
Autor: Mar��ía del Valle Dugarte Salazar.
Titulo: Diseño de pr�ácticas para el entrenamiento en el
seguimiento de trayectorias asistido por leyes de control.
Universidad de Los Andes.
Calificación:
20 puntos
Observaciones: Mención
Publicación
Publicaciones
del proyecto:
- En
congreso: Anna
Patete, Mar��ía Dugarte, "Diseño de pr�ácticas
para el entrenamiento en el seguimiento de trayectorias usando el
paquete computacional Mathematica", 6to COMETA-2015 Congreso de
Ingenier��as,
Margarita, Mueva Esparta, Venezuela, Diciembre 2015.
 Día de la presentación
Día de la presentación
|
Autor: Manuel
A. Chuecos R.
Titulo: Diseño, construcci�ón y control de un robot
m�óvil para la navegaci�ón y detecci�on de fuegos dentro
de una estructura tipo vivienda.
Universidad de Los Andes.
Calificación:
20 puntos
Co-tutor:
Prof. Mariela Cerrada, ULA.

 Robot Móvil.
Día de la presentación
Robot Móvil.
Día de la presentación
|
Autor: Viviana
M�éndez.
Titulo: Desarrollo de un m��mico basado en modelo matem�atico de un
instrumento para
cirug��a laparosc�opica.
Universidad de Los Andes.
Calificación:
20 puntos
Co-tutor:
Prof. Mariela Cerrada, ULA.
Publicaciones
del proyecto:
- En
congreso: Anna
Patete, Viviana M�éndez y Mariela Cerrada, "Desarrollo de
tijeras laparosc�opicas en m��micos computacionales", 6to Encuentro
Internacional de Estudiantes de Ingeniera (6to ENEING), Margarita, Mueva
Esparta, Venezuela, marzo 2015.
 Día de la presentación
Día de la presentación |
Autor: Pedro
Alexander Márquez Vergara.
Titulo: Diseño Modelado
Matemático y Desarrollo de un Mímico Computacional de un
Arco Reflejo.
Universidad de Los Andes.
Calificación:
20 puntos
Co-tutor:
Prof. Jesús Rodríguez-Millán, ULA.
Publicaciones
del proyecto:
- En
revista indexada: Patete
Anna, M�arquez Pedro, Rodr��guez-Millan Jes�us, "Modeling, simulation
and animation of an arc reflex system". Revista Ciencia e
Ingeniería. M�erida, Venezuela. Vol. 36, No. 2, 2015. ISSN
1316-7081. ISSN Elect. 2244-8780.
Día de la presentación
|
Autor: Juan
Carlos Rivas Molina.
Titulo: Diseño e
Implementación de un Controlador en Lazo Cerrado para el Sistema
Spring Inchworm Robot.
Universidad de Los Andes.
Calificación:
20 puntos
Co-tutor:
Prof. Iñaki Aguirre, ULA.
Publicaciones del proyecto:
- En
congreso: Juna Rivas, Anna Patete e Iñaki Aguirre.
"Diseño e Implementación de un Control en Lazo Cerrado
para el Sistema Spring Inchworm Robot", IX Congreso Internacional
Electrónica y
Tecnologías de Avanzada, Colombia, 2012.
Prototipo
propuesto del Spring Inchworm Robot (SIR).
Día de la presentación
|
Autor: Amilcar
José Erazo Perdomo.
Titulo: Diseño, Modelado y
Control de un Vehículo Aéreo no Tripulado con
Configuración de Quadrotor.
Universidad de Los Andes.
Calificación:
20 puntos
Observaciones: Mención Publicación
Publicaciones del proyecto:
- En
congreso: Anna
Patete, Amilcar Erazo, "Estudio de la Factibilidad Econ�ómica
para la
Construcci�on de un Veh��culo A�ereo no Tripulado con Configuraci�on de
Quadrotor", 2do. Congreso Venezolano de Ciencia, Tecnolog��a e
Innovaci�on. LOCTI-PEII, Caracas, Venezuela, Noviembre 2013. Resumen
publicado sin ISBN en
Libro de Res�úmenes, Tomo 1, pag 396, publicaciones MPPCTI/ONCTI.
Quadrotor.
Día de la presentación
|
Autor: Andreina
Kenisey Zambrano
Pernía.
Titulo: Diseño, Control e
Implementación de un Robot Gusano Tipo Oruga.
Universidad de Los Andes. Julio, 2011.
Calificación:
20 puntos.
Co-tutor: Prof. Iñaki Aguirre, ULA.
Publicaciones del proyecto:
- En
congreso: Anna
Patete, Iñaki Aguirre y Andreina Zambrano, "Diseño,
Control en Lazo Abierto e Implementación de un Robot Gusano Tipo
Oruga Utilizando un Solo Servomotor (4to
ENEING), Margarita, Nueva Esparta, Venezuela, Abril 2013.
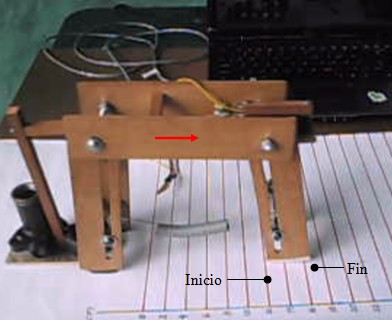
Prototipo
propuesto del Spring Inchworm Robot
(SIR).
Día de la presentación
|
Autor: María
Isabel Velasco Colmenares.
Titulo: Implementación de
Métodos de Discretización no Estándar para un
Sistema de Control no Lineal: el Péndulo Simple.
Universidad de Los Andes. Octubre, 2010.
Calificación:
19 puntos.
Publicaciones
del proyecto:
- En
congreso: Patete
Anna, Velasco María y Rodriguez-Millán Jesús,
"Validation of the Non-Standard Discretization Methods Case of Study:
The Simple Pendulum". 9th WSEAS International Conference on
Computational
Intelligence, Man-Machine Systems and Cybernetics (CIMMACS '10).
Venezuela, 2010. ISBN:
978-960-474-257-8.
- En
revista indexada: Patete
Anna, Velasco María y Rodríguez-Millán
Jesús, "Implementation of Numerical Non-Standard Discretization
Methods on a Nonlinear Mechanical System". WSEAS Transactions on
Applied and Theoretical Mechanics, Issue 3, Volume 6, pp.
97-107, July
2011. ISSN: 1991-8747.
Péndulo
Día de la
presentación
|
Autor: Jormany Quintero.
Titulo: Construcción de un
Prototipo
del Sistema CAPSUBOT para el Laboratorio de Control y
Automatización de la Escuela de Ingeniería de Sistemas.
Universidad de Los Andes,
Noviembre
2009.
Calificación: 20 puntos.
Co-tutor: Prof. Iñaki Aguirre, ULA.
Publicaciones del proyecto:
- En
congreso: Jormany Quintero, Anna Patete e Iñaki Aguirre.
"Construcción de un Prototipo del Sistema CAPSUBOT a Bajo
Costo", VII Congreso Internacional Electrónica y
Tecnologías de Avanzada, Colombia, 2009.
- En
revista indexada: Jormany Quintero, Anna Patete e Iñaki Aguirre.
"Construcción de un Prototipo del Sistema CAPSUBOT a Bajo
Costo", Revista Colombiana de Tecnologas de Avanzada, Volumen 1, Nmero
15, pp. 7-15, 2010. ISSN: 1692-7257, Depósito Legal No. S1537.
Prototipo
construido del Capsubot.
Día de la presentación
|
Autor: Arturo
Alejandro Rond�ón Quintero.
Titulo: Diseño y modelado de un bast�ón gíu��a
semi automático para personas con deficiencia visual.
Universidad de Los Andes.
Calificación:
12 puntos.
Publicaciones
del proyecto:
- En
congreso: Anna
Patete, Arturo Rondón y Mariela Cerrada, "Diseño, de un
bast�ón gíu��a semi-autom�atico para personas con
deficiencia visual", 5to Encuentro Nacional de Estudiantes de Ingeniera
(5to ENEING), Margarita, Mueva
Esparta, Venezuela, marzo 2014.
 Día de la presentación
Día de la presentación
|